Einen Arduino programmieren.... Rover
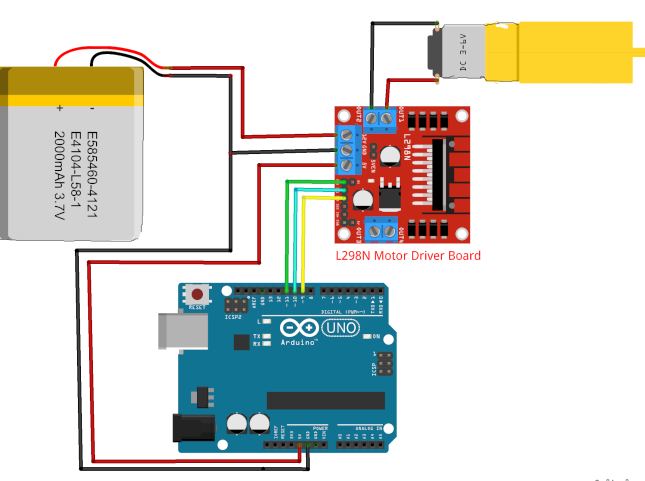
Einen Gleichstrommotor steuernEinen Motor kann man nicht direkt an einen Arduino anschieþen. Der Strom ist zu hoch und w¸rde ihn sofort zerstˆren.
Verkabelung |
Motortreiber L298N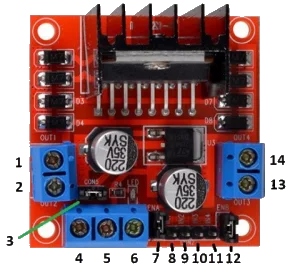
HinweiseJumper:Die Jumper 7 und 12 m¸ssen entfernt werden.Befehle:digitalWrite(PIN, WERT), analogWrite(PIN, WERT); pinMode(PIN, OUTPUT); pinMode(PIN, INPUT); Drehrichtung:Dabei sehen die Drehbewegungen folgendermaþen aus:LOW bedeutet = 0 HIGH bedeutet = 1 IN1=LOW / IN2=LOW = Der Motor steht still IN1=LOW / IN2=HIGH = Der Motor dreht vorw‰rts IN1= HIGH / IN2=LOW = Der Motor dreht r¸ckw‰rts Geschwindigkeit:Ðber den Eingang ENA wird mit einem PWM-Signal (Impulsbreitensteuerung) die Geschwindikeit geregelt.
digitalWrite(mo_v_L_IN1, LOW); digitalWrite(mo_v_L_IN2, 1); analogWrite(mo_v_L_ENA_pwm, speed); |
Lˆsungsansatz:
| AufgabeSchreibe ein Unterprogramm f¸r die Motorsteuerung
Hinweiseabs(speed):Die Funktion 'abs(speed)' liefert den absoluten Wert.abs(60) = 60 abs(-60) = 60
move(speed):
move(int speed)
{
if(speed > 0)
{
digitalWrite(mo_v_L_IN1, LOW);
digitalWrite(mo_v_L_IN2, HIGH);
} else {
...
}
analogWrite(mo_v_L_ENA_pwm,abs(speed));
}
Uno-Pinout
Nano-Pinout
ESP32-Pinout
LˆsungEs ergibt sich folgende mˆgliche Lˆsung. |
Lˆsungsansatz:
| Aufgabeƒndere das Unterprogramm so ab, damit 4 Motore gesteuert werden kˆnnenF¸ge eine Umkehr der Drehrichtung ein. Hinweisevon MOTOR VORNE LINKS an IN1 dann nach Pin 2 wird: #define mo_v_L_IN1 2
move(int speed)
{
if(speed > 0)
{
digitalWrite(mo_v_L_IN1, LOW);
digitalWrite(mo_v_L_IN2, HIGH);
} else {
digitalWrite(mo_v_L_IN2, HIGH);
digitalWrite(mo_v_L_IN1, LOW);
}
analogWrite(mo_v_L_ENA_pwm, abs(speed));
}
... ein eigenes Unterprogramm!
if(invert_li_v) {speed =* -1;}
LˆsungEs ergibt sich folgende mˆgliche Lˆsung. |